Как выполнять параллельные задачи (Threads) в программе для Arduino. Arduino delay millis и micros для организации задержки в скетче
Инструкция
Вообще говоря, Arduino не поддерживает настоящее распараллеливание задач, или мультипоточность.
Но можно при каждом повторении цикла "loop()" указать проверять, не наступило ли время выполнить некую дополнительную, фоновую задачу. При этом пользователю будет казаться, что несколько задач выполняются одновременно.
Например, давайте будем мигать с заданной частотой и параллельно этому издавать нарастающие и затихающие подобно сирене звуки из пьезоизлучателя.
И светодиод, и мы уже не раз подключали к Arduino. Соберём схему, как показано на рисунке. Если вы подключаете светодиод к цифровому выводу, отличному от "13", не забывайте о токоограничивающем резисторе примерно на 220 Ом.
Напишем вот такой скетч и загрузим его в Ардуино.
После платы видно, что скетч выполняется не совсем так как нам нужно: пока полностью не отработает сирена, светодиод не мигнёт, а мы бы хотели, чтобы светодиод ВО ВРЕМЯ сирены. В чём же здесь проблема?
Дело в том, что обычным образом эту задачу не решить. Задачи выполняются микроконтроллером строго последовательно. Оператор "delay()" задерживает выполнение программы на указанный промежуток времени, и пока это время не истечёт, следующие команды программы не будут выполняться. Из-за этого мы не можем задать разную длительность выполнения для каждой задачи в цикле "loop()" программы.
Поэтому нужно как-то сымитировать многозадачность.

Вариант, при котором Arduino будет выполнять задачи псевдо-параллельно, предложен разработчиками Ардуино в статье https://www.arduino.cc/en/Tutorial/BlinkWithoutDelay.
Суть метода в том, что при каждом повторении цикла "loop()" мы проверяем, настало ли время мигать светодиодом (выполнять фоновую задачу) или нет. И если настало, то инвертируем состояние светодиода. Это своеобразный вариант обхода "delay()".
Существенным недостатком данного метода является то, что участок кода перед блоком управления светодиодом должен выполняться , чем интервал времени мигания светодиода "ledInterval". В противном случае мигание будет происходить реже, чем нужно, и эффекта параллельного выполнения задач мы не получим. В частности, в нашем скетче длительность изменения звука сирены составляет 200+200+200+200 = 800 мсек, а интервал мигания светодиодом мы задали 200 мсек. Но светодиод будет мигать с периодом 800 мсек, что в 4 раза отличается от того, что мы задали. Вообще, если в коде используется оператор "delay()", в таком случае трудно сымитировать псевдо-параллельность, поэтому желательно его избегать.
В данном случае нужно было бы для блока управления сирены также проверять, пришло время или нет, а не использовать "delay()". Но это бы увеличило количество кода и ухудшило читаемость программы.

Чтобы решить поставленную задачу, воспользуемся замечательной библиотекой ArduinoThread, которая позволяет с лёгкостью создавать псевдо-параллельные процессы. Она похожим образом, но позволяет не писать код по проверке времени - нужно выполнять задачу в этом цикле или не нужно. Благодаря этому сокращается объём кода и улучшается читаемость скетча. Давайте проверим библиотеку в действии.
Первым делом скачаем с официального сайта https://github.com/ivanseidel/ArduinoThread/archive/master.zip архив библиотеки и разархивируем его в директорию "libraries" среды разработки Arduino IDE. Затем переименуем папку "ArduinoThread-master" в "ArduinoThread".

Схема подключений останется прежней. Изменится лишь код программы. Теперь он будет такой, как на врезке.
В программе мы создаём два потока, каждый выполняет свою операцию: один мигает светодиодом, второй управляет звуком сирены. В каждой итерации цикла для каждого потока проверяем, пришло ли время его выполнения или нет. Если пришло - он запускается на исполнение с помощью метода "run()". Главное - не использовать оператор "delay()".
В коде даны более подробные пояснения.
Загрузим код в память Ардуино, запустим. Теперь всё работает в точности так, как надо!

Энтузиазм, трудоголизм или повышенная амбициозность буквально подталкивают нас к тому, чтобы мы взваливали на себя как можно больше дел и обязательств. В итоге накануне отчетного периода голова разрывается от невыполненных задач, а "to do list" стремится к длине рулона обоев.

Вам понадобится
- - органайзер
- - софт для организации рабочего времени (например, таймер ChromoDoro - приложение Google http://clck.ru/9ZC1)
- - Расписание дел или "to do list" в виде таблицы.
- - стикеры и маркеры
Инструкция
"Тебе и мне"
Все задачи делятся на те, которые нужно сделать , а можно поручить тому, кто менее загружен. Есть порода сверхответственных руководителей, которые считают, что они должны тащить на себе работу всего отдела. Так, родители не разрешают завязывать шнурки, потому что у родителей это лучше получается. Нельзя обкрадывать и лишать подчиненного возможности блеснуть своими способностями. Так же и дома. Вместо того, чтобы каждый вечер обещать себе починить капающий кран, надо вызвать сантехника и вычеркнуть задачу из списка.
"Долой прокрастинацию"
У этого психологического феномена много разновидностей и, соответственно, определений, но в общем и целом это нежелание приступать к решению задачи. Иногда первый шаг трудно сделать из-за подсознательного страха неудачи, иногда это откровенное нежелание перейти из комфортного состояния лени в дискомфортное. Чаще всего человек говорит себе: "Вот съем яблочко, разложу пасьянс и тогда...". Нужно переключить мозги. И делать яблочко и пасьянс наградой за совершенные усилия. А , бытовая мантра будет звучать как: "Вот поработаю 15 минут - и съем яблочко! Я его заслужил(а)". Но искусство тайм-менеджмента дается нелегко.
Группы задач
В бизнесе это могут быть задачи, связанные с направлениями работы (логистика или ценообразование). У студента - тематические блоки изучаемого материала. Продвинутые делят квартиру на зоны. "Ванная", "коридор", "пространство рядом с телевизором" - у каждого индивидуальный подход. И в каждой зоне тратить не больше 15 минут на наведение порядка. Этого хватает, чтобы легко поддерживать чистоту, экономить время и не сойти с ума от чувства вины из-за невыполненных задач. Напротив каждой группы дел хорошо писать, сколько ориентировочно процентов работы выполнено. Зримые результаты работы способствуют психологическому комфорту и повышенную тревожность, которая тормозит выполнение задач.
Мотивация
Если она есть, то технические хитрости оптимизируют работу. Если с ней проблемы, то , электронные напоминалки и стикеры будут вызывать раздражение. Поэтому важно понимать выгоды от решения задач, подходить к работе осознанно. Если ум блуждает, отвлекаясь на приятную ерунду, то в , возможно, не хватает радостей. Депрессивному человеку гораздо труднее быть эффективным. А значит, стимулы для решения задач, вдохновение и особые позитивный творческий настрой нужно искать извне.
Видео по теме
Обратите внимание
Все задачи можно делить по четырем известным категориям: важные и не срочные, важные и срочные, неважные и срочные, неважные и не срочные. Тогда будет проще рассчитать время реализации каждой задачи. Главное при этом не забыть вписать пятнадцатиминутные перерывы на отдых.
Не распыляться. Мы все стараемся оправдывать чужие ожидания. Но надо учиться говорить: "Стоп". Чтобы выполнять задачу эффективно, нужно сосредотачиваться на ней полностью. А для этого, по всей видимости, нужно работать в одном направлении, напрягая все усилия ума для решения задач.
Вообще говоря, Arduino не поддерживает настоящее распараллеливание задач, или мультипоточность. Но можно при каждом повторении цикла loop() указать микроконтроллеру проверять, не наступило ли время выполнить некую дополнительную, фоновую задачу. При этом пользователю будет казаться, что несколько задач выполняются одновременно.
Например, давайте будем мигать светодиодом с заданной частотой и параллельно этому издавать нарастающие и затихающие подобно сирене звуки из пьезоизлучателя. И светодиод, и пьезоизлучатель мы уже не раз подключали к Arduino. Соберём схему, как показано на рисунке.
Если вы подключаете светодиод к цифровому выводу, отличному от "13", не забывайте о токоограничивающем резисторе примерно на 220 Ом.
2 Управление светодиодом и пьезоизлучателем с помощью оператора delay()
Напишем вот такой скетч и загрузим его в Ардуино.
Const int soundPin = 3; /* объявляем переменную с номером пина, на который подключён пьезоэлемент */ const int ledPin = 13; // объявляем переменную с номером пина светодиода void setup() { pinMode(soundPin, OUTPUT); // объявляем пин 3 как выход. pinMode(ledPin, OUTPUT); // объявляем пин 13 как выход. } void loop() { // Управление звуком: tone(soundPin, 700); // издаём звук на частоте 700 Гц delay(200); tone(soundPin, 500); // на частоте 500 Гц delay(200); tone(soundPin, 300); // на частоте 300 Гц delay(200); tone(soundPin, 200); // на частоте 200 Гц delay(200); // Управление светодиодом: digitalWrite(ledPin, HIGH); // зажигаем delay(200); digitalWrite(ledPin, LOW); // гасим delay(200); }
После включения видно, что скетч выполняется не совсем так как нам нужно: пока полностью не отработает сирена, светодиод не мигнёт, а мы бы хотели, чтобы светодиод мигал во время звучания сирены. В чём же здесь проблема?
Дело в том, что обычным образом эту задачу не решить. Задачи выполняются микроконтроллером строго последовательно. Оператор delay() задерживает выполнение программы на указанный промежуток времени, и пока это время не истечёт, следующие команды программы не будут выполняться. Из-за этого мы не можем задать разную длительность выполнения для каждой задачи в цикле loop() программы. Поэтому нужно как-то сымитировать многозадачность.
3 Параллельные процессы без оператора "delay()"
Вариант, при котором Arduino будет выполнять задачи псевдо-параллельно, предложен разработчиками Ардуино . Суть метода в том, что при каждом повторении цикла loop() мы проверяем, настало ли время мигать светодиодом (выполнять фоновую задачу) или нет. И если настало, то инвертируем состояние светодиода. Это своеобразный вариант обхода оператора delay() .
Const int soundPin = 3; // переменная с номером пина пьезоэлемента const int ledPin = 13; // переменная с номером пина светодиода const long ledInterval = 200; // интервал мигания светодиодом, мсек. int ledState = LOW; // начальное состояние светодиода unsigned long previousMillis = 0; // храним время предыдущего срабатывания светодиода void setup() { pinMode(soundPin, OUTPUT); // задаём пин 3 как выход. pinMode(ledPin, OUTPUT); // задаём пин 13 как выход. } void loop() { // Управление звуком: tone(soundPin, 700); delay(200); tone(soundPin, 500); delay(200); tone(soundPin, 300); delay(200); tone(soundPin, 200); delay(200); // Мигание светодиодом: // время с момента включения Arduino, мсек: unsigned long currentMillis = millis(); // Если время мигать пришло, if (currentMillis - previousMillis >= ledInterval) { previousMillis = currentMillis; // то запоминаем текущее время if (ledState == LOW) { // и инвертируем состояние светодиода ledState = HIGH; } else { ledState = LOW; } digitalWrite(ledPin, ledState); // переключаем состояние светодиода } }
Существенным недостатком данного метода является то, что участок кода перед блоком управления светодиодом должен выполняться быстрее, чем интервал времени мигания светодиода "ledInterval". В противном случае мигание будет происходить реже, чем нужно, и эффекта параллельного выполнения задач мы не получим. В частности, в нашем скетче длительность изменения звука сирены составляет 200+200+200+200 = 800 мсек, а интервал мигания светодиодом мы задали 200 мсек. Но светодиод будет мигать с периодом 800 мсек, что в 4 раза больше того, что мы задали.
Вообще, если в коде используется оператор delay() , в таком случае трудно сымитировать псевдо-параллельность, поэтому желательно его избегать.
В данном случае нужно было бы для блока управления звуком сирены также проверять, пришло время или нет, а не использовать delay() . Но это бы увеличило количество кода и ухудшило читаемость программы.
4 Использование библиотеки ArduinoThread для создания параллельных потоков
Чтобы решить поставленную задачу, воспользуемся замечательной библиотекой ArduinoThread , которая позволяет с лёгкостью создавать псевдо-параллельные процессы. Она работает похожим образом, но позволяет не писать код по проверке времени - нужно выполнять задачу в этом цикле или не нужно. Благодаря этому сокращается объём кода и улучшается читаемость скетча. Давайте проверим библиотеку в действии.

Первым делом скачаем с официального сайта архив библиотеки и разархивируем его в директорию libraries/ среды разработки Arduino IDE. Затем переименуем папку ArduinoThread-master в ArduinoThread .
Схема подключений останется прежней. Изменится лишь код программы.
#include
В программе мы создаём два потока - ledThread и soundThread , каждый выполняет свою операцию: один мигает светодиодом, второй управляет звуком сирены. В каждой итерации цикла для каждого потока проверяем, пришло ли время его выполнения или нет. Если пришло - он запускается на исполнение с помощью метода run() . Главное - не использовать оператор delay() . В коде даны более подробные пояснения.

Загрузим код в память Ардуино, запустим. Теперь всё работает в точности так, как надо!
Задержки в Ардуино играют очень большую роль. Без них не сможет работать даже самый простой пример Blink, который моргает светодиодом через заданный промежуток времени. Но большинство начинающих программистов мало знают о временных задержках и используют только Arduino delay, не зная побочных эффектов этой команды. В этой статье я подробно расскажу о временных функциях и особенностях их использования в среде разработки Arduino IDE.
В Arduino cуществует несколько различных команд, которые отвечают за работу со временем и паузы:
- delay()
- delayMicroseconds()
- millis()
- micros()
Они отличаются по точности и имеют свои особенности, которые стоит учитывать при написании кода.
Использование функции arduino delay
Синтаксис
Ардуино delay является самой простой командой и её чаще всего используют новички. По сути она является задержкой, которая приостанавливает работу программы, на указанное в скобках число миллисекунд. (В одной секунде 1000 миллисекунд.) Максимальное значение может быть 4294967295 мс, что примерно ровняется 50 суткам. Давайте рассмотрим простой пример, наглядно показывающий работу этой команды.
Void setup() { pinMode(13, OUTPUT); } void loop() { digitalWrite(13, HIGH); // подаем высокий сигнал на 13 пин delay(10000); // пауза 10000мс или 10 секунд digitalWrite13, LOW); // подаем низкий сигнал на 13 пин delay(10000); // пауза 10000мс или 10 секунд }
В методе setup прописываем, что пин 13 будет использоваться, как выход. В основной части программы сначала на пин подается высокий сигнал, затем делаем задержку в 10 секунд. На это время программа как бы приостанавливается. Дальше подается низкий сигнал и опять задержка и все начинается сначала. В итоге мы получаем, что на пин поочередно подается, то 5 В, то 0.
Нужно отчетливо понимать, что на время паузы с помощью delay работа программы приостанавливается, приложение не будет получать никаких данных с датчиков. Это является самым большим недостатком использования функции delay в Arduino. Обойти это ограничения можно с помощью прерываний, но об этом мы поговорим в отельной статье.
Пример delay с миганием светодиодом
 Пример схемы для иллюстрации работы функции delay.
Пример схемы для иллюстрации работы функции delay.
Можно построить схему со светодиодом и резистором. Тогда у нас получится стандартный пример – мигание светодиодом. Для этого на пин, который мы обозначили как выходной, необходимо подключить светодиод плюсовым контактом. Свободную ногу светодиода через резистор приблизительно на 220 Ом (можно немного больше) подключаем на землю. Определить полярность можно, если посмотреть на его внутренности. Большая чашечка внутри соединена с минусом, а маленькая ножка с плюсом. Если ваш светодиод новый, то определить полярность можно по длине выводов: длинная ножка – плюс, короткая – минус.
Функция delayMicroseconds
Данная функция является полным аналогом delay за исключением того, что единицы измерения у нее не миллисекунды, а микросекунды (в 1 секунде – 1000000 микросекунд). Максимальное значение будет 16383, что равно 16 миллисекундам. Разрешение равно 4, то есть число будет всегда кратно четырем. Кусочек примера будет выглядеть следующим образом:
DigitalWrite(2, HIGH); // подаем высокий сигнал на 2 пин delayMicroseconds(16383); // пауза 16383мкс digitalWrite(2, LOW); // подаем низкий сигнал на 2 пин delayMicroseconds(16383); // пауза 16383мкс
Проблема с delayMicroseconds точно такая же, как у delay – эти функции полностью «вешают» программу и она на некоторое время буквально замирает. В это время невозможна работа с портами, считывание информации с датчиков и произведение математических операций. Для мигалок данный вариант подходит, но опытные пользователи не используют её для больших проектов, так как там не нужны такие сбои. Поэтому, гораздо лучше использовать функции, описанные ниже.
Функция millis вместо delay
Функция millis() позволит выполнить задержку без delay на ардуино, тем самым обойти недостатки предыдущих способов. Максимальное значение параметра millis такое же, как и у функции delay (4294967295мс или 50 суток).
С помощью millis мы не останавливаем выполнение всего скетча, а просто указываем, сколько времени ардуино должна просто “обходить” именно тот блок кода, который мы хотим приостановить. В отличие от delay millis сама по себе ничего не останавливает. Данная команда просто возвращает нам от встроенного таймера микроконтроллера количество миллисекунд, прошедших с момента запуска. При каждом вызове loop Мы сами измеряем время, прошедшее с последнего вызова нашего кода и если разница времени меньше желаемой паузы, то игнорируем код. Как только разница станет больше нужной паузы, мы выполняем код, получаем текущее время с помощью той же millis и запоминаем его – это время будет новой точкой отсчета. В следующем цикле отсчет уже будет от новой точки и мы опять будем игнорировать код, пока новая разница millis и нашего сохраненного прежде значения не достигнет вновь желаемой паузы.
Задержка без delay с помощью millis требует большего кода, но с ее помощью можно моргать светодиодом и ставить на паузу скетч, не останавливая при этом систему.
Вот пример, наглядно иллюстрирующий работу команды:
Unsigned long timing; // Переменная для хранения точки отсчета void setup() { Serial.begin(9600); } void loop() { /* В этом месте начинается выполнение аналога delay() Вычисляем разницу между текущим моментом и ранее сохраненной точкой отсчета. Если разница больше нужного значения, то выполняем код. Если нет - ничего не делаем */ if (millis() - timing > 10000){ // Вместо 10000 подставьте нужное вам значение паузы timing = millis(); Serial.println ("10 seconds"); } }
Сначала мы вводим переменную timing, в ней будет храниться количество миллисекунд. По умолчанию значение переменной равно 0. В основной части программы проверяем условие: если количество миллисекунд с запуска микроконтроллера минус число, записанное в переменную timing больше, чем 10000, то выполняется действие по выводу сообщения в монитор порта и в переменную записывается текущее значение времени. В результате работы программы каждые 10 секунд в монитор порта будет выводиться надпись 10 seconds. Данный способ позволяет моргать светодиодом без delay.
Функция micros вместо delay
Данная функция так же может выполнить задержку, не используя команду delay. Она работает точно так же, как и millis, но считает не миллисекунды, а микросекунды с разрешением в 4мкс. Её максимальное значение 4294967295 микросекунд или 70 минут. При переполнении значение просто сбрасывается в 0, не забывайте об этом.
Резюме
Платформа Arduino предоставляет нам несколько способов выполнения задержки в своем проекте. С помощью delay вы можете быстро поставить на паузу выполнение скетча, но при этом заблокируете работу микроконтроллера. Использование команды millis позволяет обойтись в ардуино без delay, но для этого потребуется чуть больше программировать. Выбирайте лучший способ в зависимости от сложности вашего проекта. Как правило, в простых скетчах и при задержке меньше 10 секунд используют delay. Если логика работы сложнее и требуется большая задержка, то вместо delay лучше использовать millis.
Оптимизируйте ваши программы для Arduino с помощью прерываний - простого способа для реагирования на события в режиме реального времени!
Мы прерываем нашу передачу...
Как выясняется, существует отличный (но недостаточно часто используемый) механизм, встроенный во все Arduino, который идеально подходит для отслеживания событий в режиме реального времени. Данный механизм называется прерыванием. Работа прерывания заключается в том, чтобы убедиться, что процессор быстро отреагирует на важные события. При обнаружении определенного сигнала прерывание (как и следует из названия) прерывает всё, что делал процессор, и выполняет некоторый код, предназначенный для реагирования на вызвавшую его внешнюю причину, воздействующую на Arduino. После того, как этот код будет выполнен, процессор возвращается к тому, что он изначально делал, как будто ничего не случилось!
Что в этом удивительного, так это то, что прерывания позволяют организовать вашу программу так, чтобы быстро и эффективно реагировать на важные события, которые не так легко предусмотреть в цикле программы. И лучше всего это то, что прерывания позволяют процессору заниматься другими делами, а тратить время на ожидание события.
Прерывания по кнопке
Начнем с простого примера: использования прерывания для отслеживания нажатия кнопки. Для начала, мы возьмем скетч, который вы, вероятно, уже видели: пример « Button », включенный в Arduino IDE (вы можете найти его в каталоге « Примеры », проверьте меню Файл → Примеры → 02. Digital → Button).
Const int buttonPin = 2; // номер вывода с кнопкой const int ledPin = 13; // номер вывода со светодиодом int buttonState = 0; // переменная для чтения состояния кнопки void setup() { // настроить вывод светодиода на выход: pinMode(ledPin, OUTPUT); // настроить вывод кнопки на вход: pinMode(buttonPin, INPUT); } void loop() { // считать состояние кнопки: buttonState = digitalRead(buttonPin); // проверить нажата ли кнопка. // если нажата, то buttonState равно HIGH: if (buttonState == HIGH) { // включить светодиод: digitalWrite(ledPin, HIGH); } else { // погасить светодиод: digitalWrite(ledPin, LOW); } }
В том, что вы видите здесь, нет ничего шокирующего и удивительного: всё, что программа делает снова и снова, это прохождение через цикл loop() и чтение значения buttonPin . Предположим на секунду, что вы хотели бы сделать в loop() что-то еще, что-то большее, чем просто чтение состояния вывода. Вот здесь и пригодится прерывание. Вместо того, чтобы постоянно наблюдать за состоянием вывода, мы можем поручить эту работу прерыванию и освободить loop() для выполнения в это время того, что нам необходимо! Новый код будет выглядеть следующим образом:
Const int buttonPin = 2; // номер вывода с кнопкой const int ledPin = 13; // номер вывода со светодиодом volatile int buttonState = 0; // переменная для чтения состояния кнопки void setup() { // настроить вывод светодиода на выход: pinMode(ledPin, OUTPUT); // настроить вывод кнопки на вход: pinMode(buttonPin, INPUT); // прикрепить прерывание к вектору ISR attachInterrupt(0, pin_ISR, CHANGE); } void loop() { // Здесь ничего нет! } void pin_ISR() { buttonState = digitalRead(buttonPin); digitalWrite(ledPin, buttonState); }
Циклы и режимы прерываний
Здесь вы заметите несколько изменений. Первым и самым очевидным из них является то, что loop() теперь не содержит никаких инструкций! Мы можем обойтись без них, так как вся работа, которая ранее выполнялась в операторе if/else , теперь выполняется в новой функции pin_ISR() . Этот тип функций называется обработчиком прерывания: его работа состоит в том, чтобы быстро запуститься, обработать прерывание и позволить процессору вернуться обратно к основной программе (то есть к содержимому loop()). При написании обработчика прерывания следует учитывать несколько важных моментов, отражение которых вы можете увидеть в приведенном выше коде:
- обработчики должны быть короткими и лаконичными. Вы ведь не хотите прерывать основной цикл надолго!
- у обработчиков нет входных параметров и возвращаемых значений. Все изменения должны быть выполнены на глобальных переменных.
Вам, наверное, интересно: откуда мы знаем, когда запустится прерывание? Что его вызывает? Третья функция, вызываемая в функции setup() , устанавливает прерывание для всей системы. Данная функция, attachInterrupt() , принимает три аргумента:
- вектор прерывания, который определяет, какой вывод может генерировать прерывание. Это не сам номер вывода, а ссылка на место в памяти, за которым процессор Arduino должен наблюдать, чтобы увидеть, не произошло ли прерывание. Данное пространство в этом векторе соответствует конкретному внешнему выводу, и не все выводы могут генерировать прерывание! На Arduino Uno генерировать прерывания могут выводы 2 и 3 с векторами прерываний 0 и 1, соответственно. Для получения списка выводов, которые могут генерировать прерывания, смотрите документацию на функцию attachInterrupt для Arduino ;
- имя функции обработчика прерывания: определяет код, который будет запущен при совпадении условия срабатывания прерывания;
- режим прерывания, который определяет, какое действие на выводе вызывает прерывание. Arduino Uno поддерживает четыре режима прерывания:
- RISING - активирует прерывание по переднему фронту на выводе прерывания;
- FALLING - активирует прерывание по спаду;
- CHANGE - реагирует на любое изменение значения вывода прерывания;
- LOW - вызывает всякий раз, когда на выводе низкий уровень.
И резюмируя, наша настройка attachInterrupt() соответствует отслеживанию вектора прерывания 0 (вывод 2), чтобы отреагировать на прерывание с помощью pin_ISR() , и вызвать pin_ISR() всякий раз, когда произойдет изменение состояния на выводе 2.
Volatile
Еще один момент, на который стоит указать: наш обработчик прерывания использует переменную buttonState для хранения состояния вывода. Проверьте определение buttonState: вместо типа int , мы определили его, как тип volatile int . В чем же здесь дело? volatile является ключевым словом языка C, которое применяется к переменным. Оно означает, что значение переменной находится не под полным контролем программы. То есть значение buttonState может измениться и измениться на что-то, что сама программа не может предсказать - в этом случае, пользовательский ввод.
Еще одна полезная вещь в ключевом слове volatile заключается в защите от любой случайной оптимизации. Компиляторы, как выясняется, выполняют еще несколько дополнительных задач при преобразовании исходного кода программы в машинный исполняемый код. Одной из этих задач является удаление неиспользуемых в исходном коде переменных из машинного кода. Так как переменная buttonState не используется или не вызывается напрямую в функциях loop() или setup() , существует риск того, что компилятор может удалить её, как неиспользуемую переменную. Очевидно, что это неправильно - нам необходима эта переменная! Ключевое слово volatile обладает побочным эффектом, сообщая компилятору, что эту переменную необходимо оставить в покое.
Удаление неиспользуемых переменных из кода - это функциональная особенность, а не баг компиляторов. Люди иногда оставляют в коде неиспользуемые переменные, которые занимают память. Это не такая большая проблема, если вы пишете программу на C для компьютера с гигабайтами оперативной памяти. Однако, на Arduino оперативная память ограничена, и вы не хотите тратить её впустую! Даже C компиляторы для компьютеров будут поступать точно так же, несмотря на массу доступной системной памяти. Зачем? По той же причине, по которой люди убирают за собой после пикника - это хорошая практика, не оставлять после себя мусор.
Подводя итоги
Прерывания - это простой способ заставить вашу систему быстрее реагировать на чувствительные к времени задачи. Они также обладают дополнительным преимуществом - освобождением главного цикла loop() , что позволяет сосредоточить в нем выполнение основной задачи системы (я считаю, что использование прерываний, как правило, позволяет сделать мой код немного более организованным: проще увидеть, для чего разработан основной кусок кода, и какие периодические события обрабатываются прерываниями). Пример, показанный здесь, - это самый базовый случай использования прерываний; вы можете использовать для чтения данных с I2C устройства, беспроводных передачи и приема данных, или даже для запуска или остановки двигателя.
Есть какие-нибудь крутые проекты с прерываниями? Оставляйте комментарии ниже!
Узнаем, как работать с прерываниями по таймеру. Напишем простую программу с параллельными процессами.
В реальной программе надо одновременно совершать много действий. Во введении я приводил пример . Перечислю, какие действия она совершает:
|
Операция |
Время цикла |
| Опрашивает 3 кнопки, обрабатывает сигналы с них для устранения дребезга | 2 мс |
| Регенерирует данные семисегментных светодиодных индикаторов | 2 мс |
| Вырабатывает сигналы управления для 2 датчиков температуры DS18B20 и считывает данные с них. Датчики имеют последовательный интерфейс 1-wire. | 100 мкс для каждого бита, 1 сек общий цикл чтения |
| Чтение аналоговых значений тока и напряжения на элементе Пельтье, напряжения питания | 100 мкс |
| Цифровая фильтрация аналоговых значений тока и напряжения | 10 мс |
| Вычисление мощности на элементе Пельтье | 10 мс |
| ПИД (пропорционально интегрально дифференциальный) регулятор стабилизации тока и напряжения | 100 мкс |
| Регулятор мощности | 10 мс |
| Регулятор температуры | 1 сек |
| Защитные функции, контроль целостности данных | 1 сек |
| Управление, общая логика работы системы | 10 мс |
Все эти операции выполняются циклически, у всех разные периоды циклов. Ни какую из них нельзя приостановить. Любое, даже кратковременное, изменение времени периода операции приведет к неприятностям: значительной погрешности измерения, неправильной работе стабилизаторов, мерцанию индикаторов, неустойчивой реакции нажатий на кнопки и т.п.
В программе контроллера холодильника существует несколько параллельных процессов, которые и совершают все эти действия, каждое в цикле со своим временем периода. Параллельные процессы - это процессы, действия которых выполняются одновременно.
В предыдущих уроках мы создали класс для объекта кнопка. Мы сказали, что это класс для обработки сигнала в параллельном процессе. Что для его нормальной работы необходимо вызывать функцию (метод) обработки сигнала в цикле с регулярным периодом (мы выбрали время 2 мс). И тогда в любом месте программы доступны признаки, показывающие текущее состояние кнопки или сигнала.
В одном цикле мы поместили код обработки состояния кнопок и управление светодиодами. А в конце цикла поставили функцию задержки delay(2). Но, время на выполнение программы в цикле меняет общее время цикла. И период цикла явно не равен 2 мс. К тому же, во время выполнения функции delay() программа зависает и не может производить других действий. На сложной программе получится полный хаос.
Выход - вызывать функцию обработки состояния кнопки по прерыванию от аппаратного таймера. Каждые 2 мс основной цикл программы должен прерываться, происходить обработка сигнала кнопки и управление возвращаться в основной цикл на код, где он был прерван. Короткое время на обработку сигнала кнопки не будет значительно влиять на выполнение основного цикла. Т.е. обработка кнопки будет происходить параллельно, незаметно для основной программы.
Аппаратное прерывание от таймера.
Аппаратное прерывание это сигнал, сообщающий о каком-то событии. По его приходу выполнение программы приостанавливается, и управление переходит на обработчик прерываний. После обработки управление возвращается в прерванный код программы.
С точки зрения программы прерывание это вызов функции по внешнему, не связанному напрямую с программным кодом, событию.
Сигнал прерывания от таймера вырабатывается циклически, с заданным временем периода. Формирует его аппаратный таймер – счетчик с логикой, сбрасывающий его код при достижении определенного значения. Программно установив код для логики сброса, мы можем задать время периода прерывания от таймера.
Установка режима и времени периода таймера Ардуино производится через аппаратные регистры микроконтроллера. При желании можете разобраться, как это делается. Но я предлагаю более простой вариант – использование библиотеки MsTimer2. Тем более, что установка режима таймера происходит редко, а значит, использование библиотечных функций не приведет к замедлению работы программы.
Библиотека MsTimer2.
Библиотека предназначена для конфигурирования аппаратного прерывания от Таймера 2 микроконтроллера. Она имеет всего три функции:
- MsTimer2::set(unsigned long ms, void (*f)())
Эта функция устанавливает время периода прерывания в мс. С таким периодом будет вызываться обработчик прерывания f. Он должен быть объявлен как void (не возвращает ничего) и не иметь аргументов. * f – это указатель на функцию. Вместо него надо написать имя функции.
- MsTimer2::start()
Функция разрешает прерывания от таймера.
- MsTimer2::stop()
Функция запрещает прерывания от таймера.
Перед именем функций надо писать MsTimer2::, т.к. библиотека написана с использованием директивы пространства имен namespace.
Для установки библиотеки скопируйте каталог MsTimer2 в папку libraries в рабочей папке Arduino IDE. За тем запустите программу Arduino IDE, откройте Скетч -> Подключить библиотеку и посмотрите, что в списке библиотек присутствует библиотека MsTimer2.
Загрузить библиотеку MsTimer2 в zip-архиве можно . Для установки его надо распаковать.
Простая программа с параллельной обработкой сигнала кнопки.
Теперь напишем простую программу с одной кнопкой и светодиодом из урока 6. К плате Ардуино подключена одна кнопка по схеме: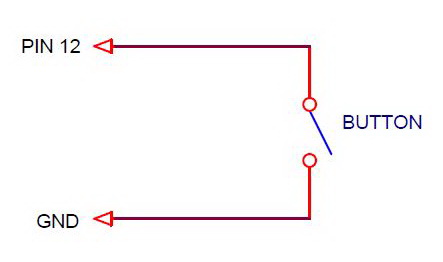
Выглядит это так:

На каждое нажатие кнопки светодиод на плате Ардуино меняет свое состояние. Необходимо чтобы были установлены библиотеки MsTimer2 и Button:
MsTimer2
И оплатите. Всего 25 руб. в месяц за доступ ко всем ресурсам сайта!
// sketch_10_1 урока 10
// Нажатие на кнопку меняет состояние светодиода
#include
#include
#define LED_1_PIN 13 //
#define BUTTON_1_PIN 12 // кнопка подключена к выводу 12
Button button1(BUTTON_1_PIN, 15); // создание объекта - кнопка
void setup() {
MsTimer2::set(2, timerInterupt); // задаем период прерывания по таймеру 2 мс
MsTimer2::start(); //
}
void loop() {
// управление светодиодом
if (button1.flagClick == true) {
// был клик кнопки
}
}
// обработчик прерывания
void timerInterupt() {
button1.scanState(); // вызов метода ожидания стабильного состояния для кнопки
}
В функции setup() задаем время цикла прерывания по таймеру 2 мс и указываем имя обработчика прерывания timerInterrupt . Функция обработки сигнала кнопки button1.scanState() вызывается в обработчике прерывания таймера каждые 2 мс.
Таким образом, состояние кнопки мы обрабатываем параллельным процессом. А в основном цикле программы проверяем признак клика кнопки и меняем состояние светодиода.
Квалификатор volatile.
Давайте изменим цикл loop() в предыдущей программе.
void loop() {
while(true) {
if (button1.flagClick == true) break;
}
// был клик кнопки
button1.flagClick= false; // сброс признака
digitalWrite(LED_1_PIN, ! digitalRead(LED_1_PIN)); // инверсия светодиода
}
Логически ничего не поменялось.
- В первом варианте программа проходила цикл loop до конца и в нем анализировала флаг button1.flagClick.
- Во втором варианте программа анализирует флаг button1.flagClick в бесконечном цикле while. Когда флаг становится активным, то выходит из цикла while по break и инвертирует состояние светодиода.
Разница только в том, в каком цикле крутится программа в loop или в while.
Но если мы запустим последний вариант программы, то увидим, что светодиод не реагирует на нажатие кнопки. Давайте уберем класс, упростим программу.
#include
#define LED_1_PIN 13 // светодиод подключен к выводу 13
int count=0;
void setup() {
pinMode(LED_1_PIN, OUTPUT); // определяем вывод светодиода как выход
MsTimer2::set(500, timerInterupt); // задаем период прерывания по таймеру 500 мс
MsTimer2::start(); // разрешаем прерывание по таймеру
}
void loop() {
while (true) {
if (count != 0) break;
}
count= 0;
digitalWrite(LED_1_PIN, ! digitalRead(LED_1_PIN)); // инверсия состояния светодиода
}
// обработчик прерывания
void timerInterupt() {
count++;
}
В этой программе счетчик count увеличивается на 1 в обработчике прерывания каждые 500 мс. В цикле while он анализируется, по break выходим из цикла и инвертируем состояние светодиода. Проще программы не придумаешь, но она тоже не работает.
Дело в том, что компилятор языка C++ по мере своего интеллекта оптимизирует программу. Иногда это не идет на пользу. Компилятор видит, что в цикле while никакие операции с переменной count не производятся. Поэтому он считает, что достаточно проверить состояние count только один раз. Зачем в цикле проверять, то, что никогда не может измениться. Компилятор корректирует код, оптимизируя его по времени исполнения. Проще говоря убирает из цикла код проверки переменной. Понять, что переменная count меняет свое состояние в обработчике прерывания, компилятор не может. В результате мы зависаем в цикле while.
В вариантах программы с выполнением цикла loop до конца компилятор считает, что все переменные могут измениться и оставляет код проверки. Если в цикл while вставить вызов любой системной функции, то компилятор также решит, что переменные могут измениться.
Если, например, добавить в цикл while вызов функции delay(), то программа заработает.
while (true) {
if (count != 0) break;
delay(1);
}
Хороший стиль – разрабатывать программы, в которых цикл loop выполняется до конца и программа нигде не подвисает. В следующем уроке будет единственный код с анализом флагов в бесконечных циклах while. Дальше я планирую во всех программах выполнять loop до конца.
Иногда это сделать непросто или не так эффективно. Тогда надо использовать квалификатор volatile. Он указывается при объявлении переменной и сообщает компилятору, что не надо пытаться оптимизировать ее использование. Он запрещает компилятору делать предположения по поводу значения переменной, так как переменная может быть изменена в другом программном блоке, например, в параллельном процессе. Также компилятор размещает переменную в ОЗУ, а не в регистрах общего назначения.
Достаточно в программе при объявлении count написать
volatile int count=0;
и все варианты будут работать.
Для программы с управлением кнопкой надо объявить, что свойства экземпляра класса Button могут измениться.
volatile Button button1(BUTTON_1_PIN, 15); // создание объекта - кнопка
По моим наблюдениям применение квалификатора volatile никак не увеличивает длину кода программы.
Сравнение метода обработки сигнала кнопки с библиотекой Bounce.
Существует готовая библиотека для устранения дребезга кнопок Bounce. Проверка состояния кнопки происходит при вызове функции update(). В этой функции:
- считывается сигнал кнопки;
- сравнивается с состоянием во время предыдущего вызова update();
- проверяется, сколько прошло времени с предыдущего вызова с помощью функции millis();
- принимается решение о том, изменилось ли состояние кнопки.
- Но это не параллельная обработка сигнала. Функцию update() обычно вызывают в основном, асинхронном цикле программы. Если ее не вызывать дольше определенного времени, то информация о сигнале кнопки будет потеряна. Нерегулярные вызовы приводят к неправильной работе алгоритма.
- Сама функция имеет достаточно большой код и выполняется намного дольше функций библиотеки Button ().
- Цифровой фильтрации сигналов по среднему значению там вообще нет.
В сложных программах эту библиотеку лучше не использовать.
В следующем уроке напишем более сложную программу с параллельными процессами. Узнаем, как реализовывать выполнение блоков программы в циклах с различными временными интервалами от одного прерывания по таймеру.
Рубрика: . Вы можете добавить в закладки.

